



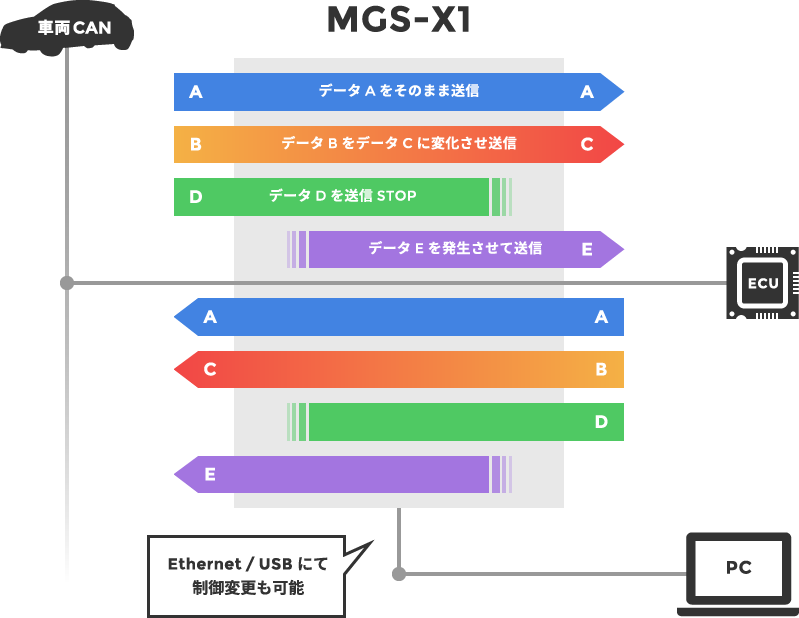
車両CANバス・LINバスをフルゲートウェイ及び、通信フレームの再構築可能。OSを使用せずDMAと割り込みを駆使することで、非常に高速な処理を実現。
【対応プロトコル】
CAN,LIN,RS232C,Ethernet,USB2.0,DIO,A/D IN,SINK OUT,SRC OUT and more…
150mm(幅)×35mm(高さ)×110mm(奥行)と小型ながら多彩なインターフェイスを完備。OSを使用せず軽く低消費で高速動作。シャットダウン不要、起動時間1秒以下。入力電圧12V(5.5~27Vまで動作)/消費電流110mA。車両CANバスをフルゲートウェイしながら必要な情報のみを化かす事が可能。Ethernetを使用したIoT検討環境提供。
| インターフェイス | チャネル数 |
|---|---|
| CAN | 4ch |
| LIN | 6ch(内2chはRS232Cと共用のため選択して使用) |
| RS232C | 2ch(LINと共用のため選択して使用) |
| Ethernet | 1ch |
| USB2.0 | ホスト/デバイス機能 各1ch |
| デジタル入出力 | 10ch |
| アナログ/デジタル入力 | 8ch(10bitAD_IN) |
| シンクデジタル出力 | 8ch |
| ソースデジタル出力 | 4ch |
| EEPROM | 2個(1個につき1Mbit), I2Cインターフェース |
CAN/CAN、CAN/LINなどの車両情報をEthernetやUSBなどにゲートウェイすることが可能。APIライブラリを使用することで、同一または異なるプロトコル間のゲートウェイ処理が可能。(対応プロトコル : CAN/LIN/USB)
MGS-X1内にWebサーバ(HTTPプロトコル)を構築することにより、ブラウザからハードウェアの監視や制御を行うことができます。サーバアプリケーションは、フラッシュ内のMDDに書き込んで使用。無線LANルーターを使用すれば、タブレットやスマホでの監視や制御が可能となります。

4chのCAN通信機能を搭載(通信速度:125kbps/250kbps/500kbps/1Mbps)。1chにつき、最大で送信=32ID/受信=26IDのフレーム処理が可能(拡張フレームにも対応※カスタマイズによりID数を増やすことが可能)。APIライブラリを使用することで、①定期送信、②イベント送信、③イベント+定期送信の3通りのフレーム送信が可能。アプリケーションでは面倒なタイミング制御が不要になり、効率的な開発が可能。フレーム受信は、①全てのフレームを受信、②前回受信データから値が変更された時のみ受信の2通りの選択が可能。
最大6chのLIN通信機能を搭載(通信速度:2400bps/4800bps/5200bps/9600bps/10.4kbps/19.2kbps)。APIライブラリを使用することで、レスポンス送信が可能。1chにつきスケジュールは最大254パターン登録可能。送受信それぞれ32IDのレスポンス処理可能。LIN1.3/LIN2.1対応。
CPU間は20Mbpsの高速UART通信でデータの共有が可能。誤り検出はチェックサム方式を採用。
Main/Sub CPUにそれぞれ1MbitのEEPROMを1個搭載(通信速度:1Mbps DMA/割込処理対応)。APIライブラリを使用することでアプリケーションでは面倒なI2C制御が不要になり効率的な開発が可能。
2chのRS232C通信機能を搭載(通信速度:最大230.4kbps※カスタマイズにより最大500kbpsまで対応可能)。
16bitのLED出力、8bitのSW入力を搭載。
アプリケーションを効率的に開発するためのAPIを用意。APIを使用することでPIC32MXハードウェアの面倒な制御をライブラリ内で処理させることが可能。DMA・割込み処理を駆使し処理時間を低減。




